| 摘要:针对UPS逆变控制技术的特点,分析比较了UPS逆变控制技术的原理和算法,并给出了基于不同硬件的设计方法和流程。文中重点阐述了基于PIC单片机和基于DSP控制器的几种不同方式的逆变控制原理。 |
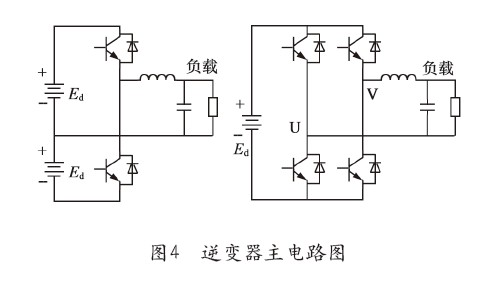
如图5所示,在逆变器系统中,Uin是逆变桥的输出,是一个中间变量,只有脉宽ΔT才是原始的控制量。并且,逆变器主电路可以认为是一种数模混合电路,因而利用离散变量状态方程可以更方便的分析。对于图4所示电路,Uin可以是单极性,也可以是双极性的。若Uin为图5所示双极性,则可将式(5)离散化为:

式(6)和(7)分别对应图5的(a)、(b),分别取矩阵方程(5)的第一行和式(6),并令UC为参考正弦,则所需脉宽可相应计算。那么,在每个开关周期的开始,必须先检测UC、IC(母线电压E的变化较小,不必精确按时检测),然后再计算ΔT。因此,在实际系统中,通常需要三个传感器和A/D转换器检测直流母线电压、输出电压和滤波电容电流。由于A/D转换和计算都需要一定的时间,因此ΔT的最大值受到限制。从图5可知,若输出为正时,采用图(a),则ΔT≤0.5T。所以,存在足够的(T-ΔT)/2时间用于采样和计算。

普通PWM逆变器在空载和满载时,其输出相位有较大的差异,这是因为逆变桥的输出相位虽与给定正弦同相,但是LC滤波器的相移与负载有关。无差拍控制逆变器的输出相位基本不变,它通过调节逆变桥的输出相位来弥补LC滤波器的相位延时。
 评论表单加载中...
评论表单加载中...




